


")
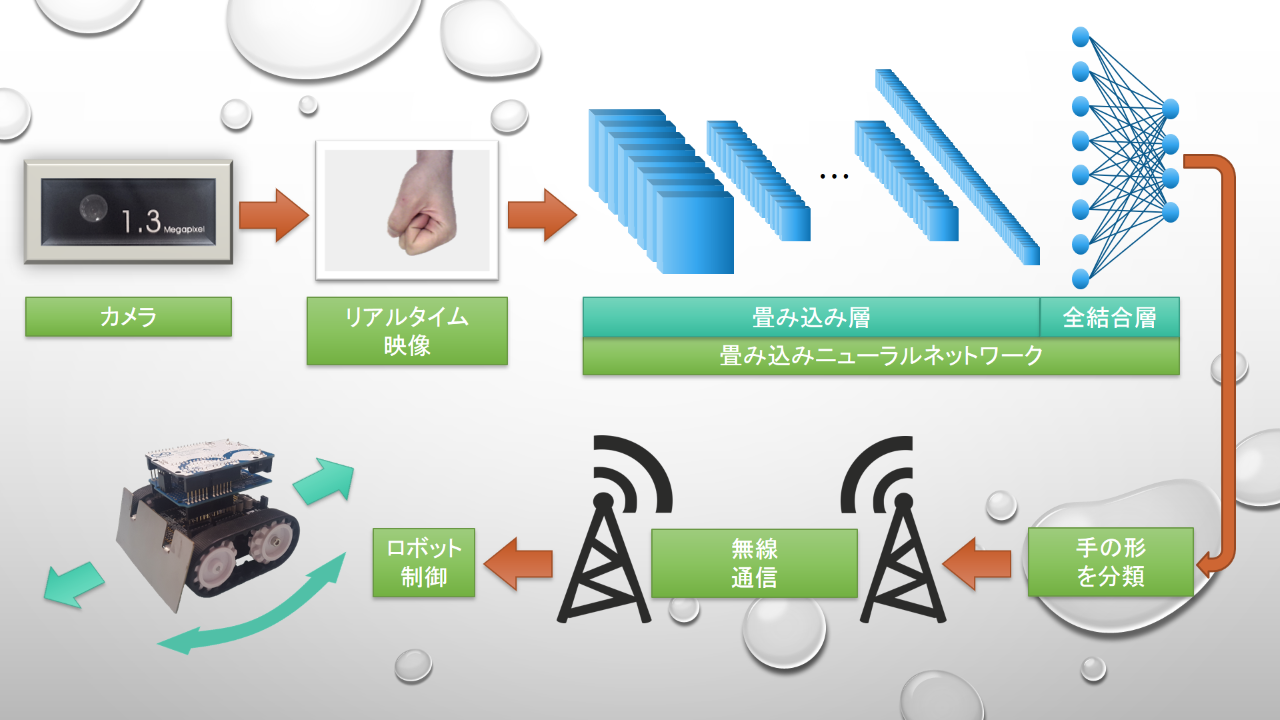
このシステムはAIとロボット制御部の2つのユニットによって構成されます。AIはWebカメラの映像を解析し、映っている手の形を認識します。また、ロボット制御部は認識した手の形の情報を受け取り、対応する動作をロボットに司令します。ロボットとAIは完全に独立して動作しており、お互いの情報伝達は無線通信によって行われます。
AIの取り組み・開発実績

非接触操作デバイス「UbiMouseLite」の開発
画面に触れず操作ができる非接触操作デバイスの開発 指をかざすだけで操作でき、感染防止・汚染対策に 弊社では、画面やマウスに触れることなく・・・・
詳しく見る>>
AIの取り組み・開発実績

飲食店のオーダー端末やオフィスの受付を非接触化。非接触デバイスの「UbiMouseTablet」を実現。
タブレット端末で動作可能な「UbiMouseTablet」を開発しました
詳しく見る>>
AIの取り組み・開発実績

非接触操作デバイス「UbiMouseSimple」の開発
弊社では、指を使って触れることなく簡単に画面を操作することのできる指のマウス「UbiMouse」の単機能版を開発しました。
詳しく見る>>
AIの取り組み

簡単・手軽に画像処理を省力化「CRAFT-IT」の販売開始
弊社では画像処理構築の圧倒的な省力化・自動化を可能にする新しい進化的画像処理ソフトウェアCRAFT-IT を販売しております。
詳しく見る>>
AIの取り組み・ロボット技術
ロボットや車両をカメラ越しに自動操縦するソフトウェアを開発
弊社では、操作画面上をクリックしてドットを配置するだけで指定位置にロボットや車両を動かすことのできる自動操縦ソフトウェアを開発しました。
詳しく見る>>
AIの取り組み・開発実績
画面に触れず操作ができる、非接触操作AIソフト「UbiMouse」を開発
弊社では、指を使って触れることなく簡単に画面を操作することのできる指のマウス「UbiMouse」のAIソフト開発を行いました。
詳しく見る>>