")
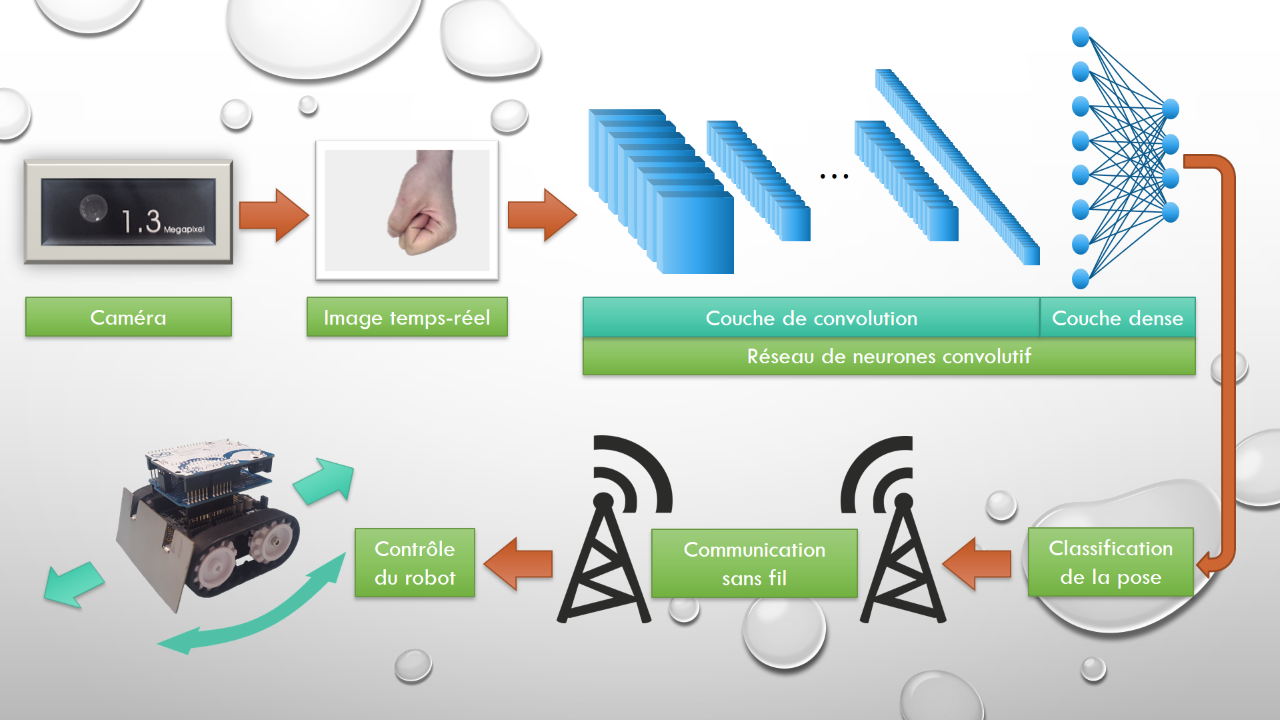
Ce système utilise un modèle d’intelligence artificielle pour analyser le flux vidéo venant de la caméra, qui prédit quelle est la pose de la main sur la vidéo. Le contrôleur du robot reçoit la prédiction and commande un mouvement sur les axes du robot. Grâce à une communication sans-fil entre le robot et l’intelligence artificielle, ceux-ci sont complètement indépendants.
Développement・Technologie de robot

Fabrication de robots de travail anti-déflagrations – Conseil en développement d’équipements anti-déflagrations
Nous concevons et fabriquons des robots mobiles autonomes qui peuvent fonctionner dans un environnement rempli de gaz in・・・・
Plus de détails>>
Technologie de robot
Analyse numérique
Analyse numérique des données mesurées avec divers capteurs et traitement du signal. Nous développons des systèmes d'an・・・・
Plus de détails>>
Technologie de robot

I.A. & Robot
Nous développons des robots sur mesure en fonction de votre demande. Pour les clients qui ne sont pas en mesure de faire・・・・
Plus de détails>>